
Adaptive control with non-recursive schemes for robot systems
Keywords:
Robot; Adaptive control; Non-recursive control design; Unknown system parameters.
Abstract
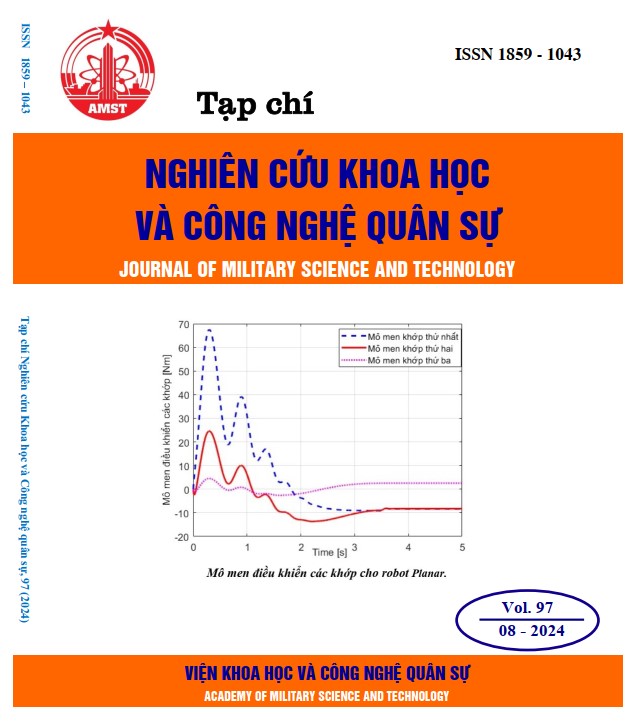
In this paper, the authors consider the design of adaptive controllers for robot systems with uncertain system parameters. A new non-recursive adaptive controller is proposed for a robot system, with the controller coefficients being time-varying and updated online to avoid the need for an estimator to estimate the uncertain model parameters. The controller is analyzed and shown to be stable in the Lyapunov theory. The tracking error of the joint trajectories and all the parameters in the closed-loop system converge asymptotically to the origin and are bounded. Finally, simulations are performed to verify the feasibility and effectiveness of the proposed control method.
điểm /
đánh giá
Published
2024-08-25
Issue
Section
Electronics & Automation